Définir / Modifier des moteurs

Définir/Éditer des moteurs
|
|
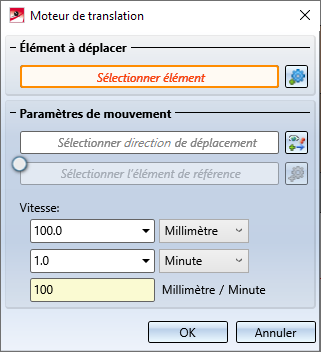
Moteur de translation Le moteur de translation (ou de déplacement) déplace l'élément de la construction selon une vitesse donnée dans une direction donnée. Si vous indiquez une vitesse négative, l'élément se déplacera alors dans la direction inverse.
Pour spécifier un élément de référence, cochez tout d'abord la case
Le moteur de translation sera affiché ainsi dans l'arborescence de la simulation. Il aura automatiquement comme nom Moteur de translation_n, où n est un numéro consécutif donné automatiquement par HiCAD. |
||||||
|
|
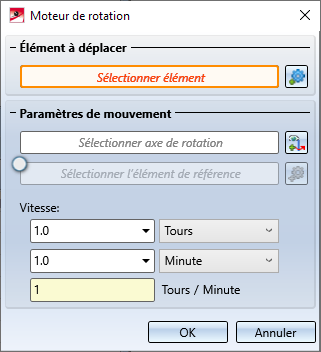
Moteur de rotation Le moteur de rotation pivote l'élément de la construction selon une vitesse donnée autour d'un axe donné. Si vous indiquez une vitesse négative, l'élément se déplacera alors dans la direction inverse.
La définition d'un moteur de rotation est similaire à celle d'un moteur de translation. Au lieu d'une direction, c'est un axe de rotation qui sera indiqué - en identifiant une arête ou en déterminant deux points. L'axe de rotation sera indiqué par une flèche de rotation. La vitesse sera déterminée par le nombre de rotations par unité de temps ou par l'angle de rotation par unité de temps. Le moteur de rotation sera affiché ainsi dans l'arborescence de la simulation. Il aura automatiquement comme nom Moteur de rotation_n, où n est un numéro consécutif donné automatiquement par HiCAD. |
||||||
|
|
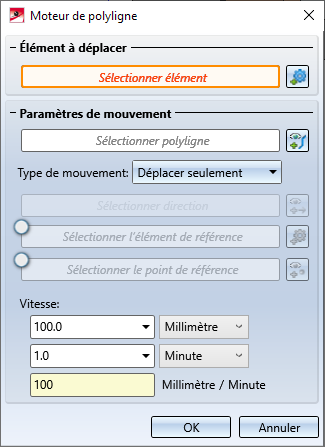
Moteur de polyligne Le moteur de polyligne déplace l'élément de la construction selon une vitesse donnée le long d'une polyligne donnée. Si vous indiquez une vitesse négative, l'élément se déplacera alors dans la direction inverse. Le type de mouvement se comporte d'une manière similaire au sweep de chaîne d'arêtes. La vitesse peut être négative.
La définition d'un moteur de polyligne est similaire à celle d'un moteur de translation. Au lieu d'une direction de déplacement, c'est une polyligne qui sera ici identifiée. Vous pouvez en plus sélectionner ici un type de mouvement - comme dans la fonction Sweep de chaîne d'arêtes - ainsi qu'un point de référence. Types de mouvement
Point de référence Sans spécification d'un point de référence, les moteurs de polyligne démarrent et finissent toujours au point initial et final de la polyligne et calculent les transformations comme si l'élément à déplacer était situé à cet endroit. Si l'élément à déplacer est éloigné de ce point initial, l'élément effectuera alors un mouvement inattendu. Un problème similaire survient lorsque l'élément doit démarrer au milieu d'une arête. Dans ce cas, il est loin du point initial et final de l'arête, ce qui provoque également des mouvements inattendus. De tels problèmes peuvent être évités en précisant un point de référence approprié sur l'élément. Ce point de référence sera projeté sur la polyligne. Le moteur de polyligne calculera alors les transformations par rapport à ce point et à la polyligne, et non plus par rapport au point initial choisi précédemment.
Le moteur de polyligne sera affiché ainsi dans l'arborescence de la simulation. Il aura automatiquement comme nom Moteur de polyligne_n, où n est un numéro consécutif donné automatiquement par HiCAD.
Vous trouvez un exemple pour les moteurs de polyligne avec point de référence à la page suivante. |

 et identifiez l'élément de votre choix dans l'ICN ou sur la scène. L'élément est surligné en couleur.
et identifiez l'élément de votre choix dans l'ICN ou sur la scène. L'élément est surligné en couleur. et spécifiez la direction en identifiant une arête ou en déterminant deux points (clic droit). La direction choisie est identifiée par un symbole vectoriel.
et spécifiez la direction en identifiant une arête ou en déterminant deux points (clic droit). La direction choisie est identifiée par un symbole vectoriel.  . Cliquez ensuite sur le symbole
. Cliquez ensuite sur le symbole  et identifiez l'élément de référence sur la scène ou dans l'ICN. L'élément de référence doit également être un élément motorisé, c'est-à-dire un élément pour lequel un moteur a été défini.
et identifiez l'élément de référence sur la scène ou dans l'ICN. L'élément de référence doit également être un élément motorisé, c'est-à-dire un élément pour lequel un moteur a été défini. 

![]() À savoir :
À savoir :
- Un élément peut être utilisé parallèlement dans plusieurs moteurs.
- Lors de la visualisation, vous avez la possibilité de lire la simulation en avant ou en arrière. Pour le calcul de la simulation cependant, le type de visualisation ne sera pas pris en compte. Cette particularité peut être évitée en créant un autre moteur avec presque les mêmes données, mais avec une direction inversée. L'intervalle de temps de ce moteur doit alors commencer après l'intervalle de temps du premier moteur. Pour les films, la lecture avant et arrière des simulations peut être sélectionnée dans les Paramètres de création du film.
- Dans le mode Simulation physique, la fonction Moteur de polyligne est condamnée.
- Les moteurs peuvent également être définis quand les éléments de la construction sont dans un état "déplacé", c'est-à-dire quand la simulation est sur pause. Pour que ces moteurs soient cependant pris en compte dans la simulation, celle-ci doit tout d'abord être calculée à nouveau.
Modifier des moteurs
Pour modifier les paramètres d'un moteur, effectuez un double-clic sur le nom du moteur dans l'arborescence de la simulation. La fenêtre de dialogue correspondante s'ouvre alors. L'élément, ainsi que - selon le type de moteur choisi - le sens de déplacement, l'axe de rotation ou la polyligne seront alors surlignés en couleur sur la scène.
Procédez à la modification des paramètres et quittez la fenêtre de dialogue par OK.
Renouvelez le calcul de la simulation !
Par un clic droit sur le nom d'un moteur dans l'arborescence de la simulation, vous ouvrez un menu contextuel donnant accès à d'autres fonctions de modification du moteur :
Un moteur désactivé ne sera pas pris en compte lors du calcul de la simulation. Un moteur supprimé peut être restauré par Undo (CTRL + Z).
Si le moteur est "actif" ou "inactif" est indiqué dans l'arborescence de la simulation par un symbole différent. Les symboles ont les significations suivantes :
|
|
Moteur de translation actif |
|
Moteur de translation inactif |
|
|
Moteur de rotation actif |
|
Moteur de rotation inactif |
|
|
Moteur de polyligne actif |
|
Moteur de polyligne inactif |
|
|
Informations du moteur incomplètes. |
|
|







![]() À savoir :
À savoir :
La longueur d'un intervalle de temps peut être reprise comme une valeur de temps pour la vitesse (vélocité) d'un moteur. Cliquez avec le bouton droit de la souris sur la ligne de temps et sélectionnez Appliquer le temps. La fenêtre de dialogue pour le moteur s'affiche alors, et la valeur modifiée est mise en évidence en rouge.

Fenêtre d'ancrage Simulation (3D) • Exemples de simulation (3D)