Exemple de simulation - Moteur de polyligne avec point de référence
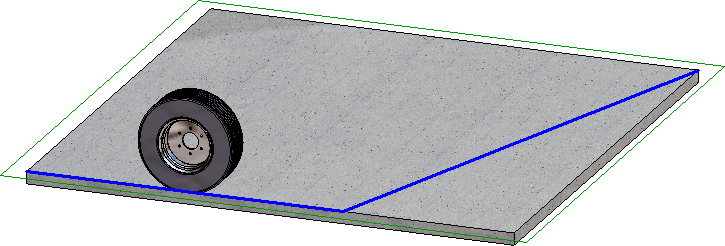
Dans cet exemple, la roue doit être déplacée le long de la polyligne surlignée - d'abord sans, puis avec saisie d'un point de référence.
Cas 1 : sans utiliser de point de référence
- Créez une Nouvelle simulation
 .
.
- Désactivez le contrôle de la vue par un clic droit sur
 Contrôle de la vue puis sélectionnez
Contrôle de la vue puis sélectionnez  Désactiver.
Désactiver.
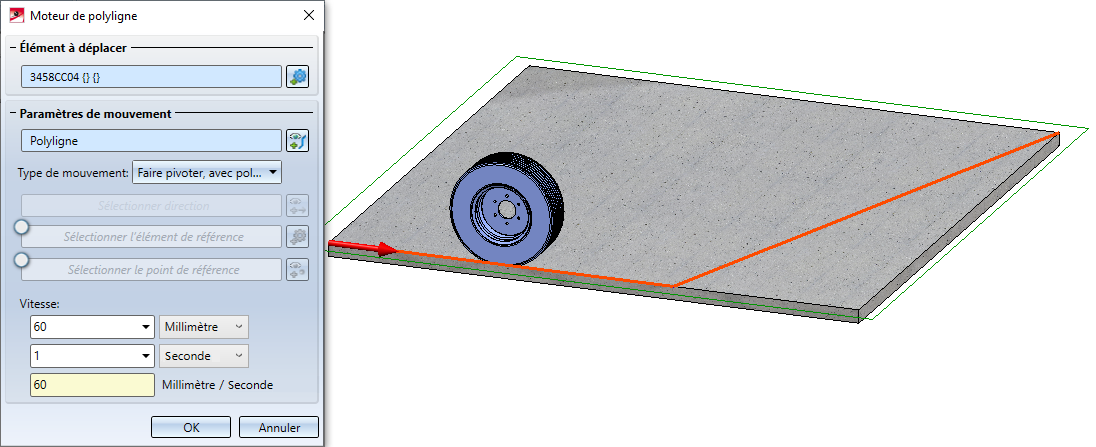
- Lancez la fonction Moteur de polyligne
 (avec comme élément à déplacer la roue, la polyligne est l'esquisse surlignée en bleu, Direction : Polyligne, Type de mouvement : Faire pivoter, avec polyligne, sans point de référence, Vitesse : 60 mm/sec).
(avec comme élément à déplacer la roue, la polyligne est l'esquisse surlignée en bleu, Direction : Polyligne, Type de mouvement : Faire pivoter, avec polyligne, sans point de référence, Vitesse : 60 mm/sec).
- Durée maximale de la simulation : 9 sec.
- Calculer la simulation.
Film de la simulation
Comme on le voit dans le film, le moteur de polyligne commence au début de la polyligne. Toutes les transformations sont calculées comme si la roue se trouvait à cet endroit. Cela provoque donc un mouvement "indésirable" avant que la roue ne change de direction.

Cas 2 : Avec saisie d'un point de référence
Nous utilisons ici les mêmes paramètres que dans le cas 1, mais en sélectionnant un point de référence au niveau du point quadrant inférieur de la roue.
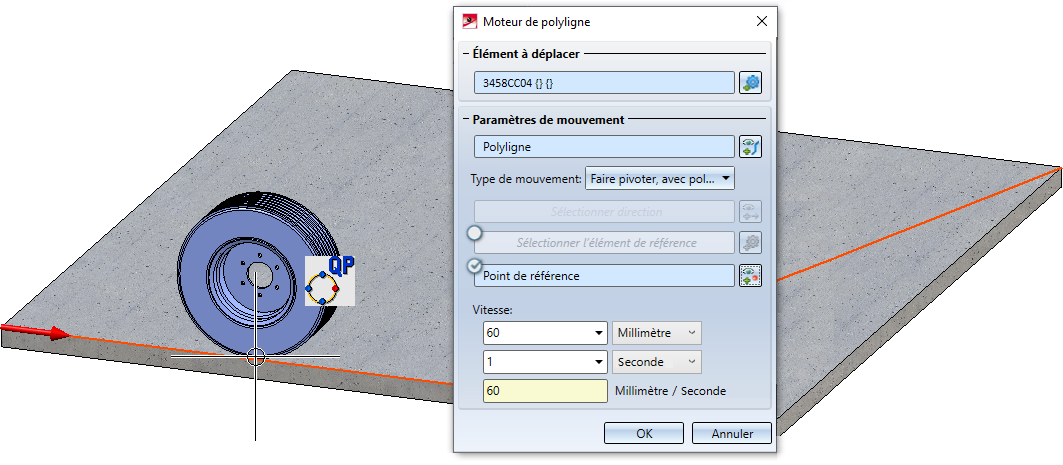
Le point de référence est symbolisé ici par un symbole sphérique.
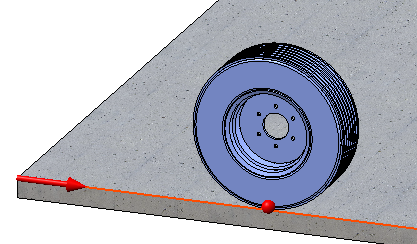
Lorsque l'on recalcule la simulation, aucun saut d'une ligne à l'autre ne se produit alors.
Film de la simulation

