Motoren definieren / bearbeiten

Motoren definieren/bearbeiten
|
|
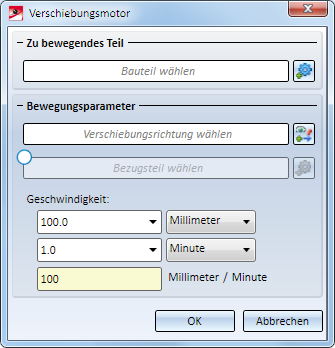
Verschiebungsmotor Der Verschiebungsmotor bewegt ein Bauteil mit einer bestimmten Geschwindigkeit in eine vorgegebene Richtung. Wird die Geschwindigkeit negativ angegeben, dann bewegt sich das Teil in die entgegengesetzte Richtung.
Um ein Bezugsteil zu bestimmen, müssen Sie zunächst die Option aktivieren
Der Verschiebungsmotor wird anschließend im Simulationsbaum angezeigt. Als Name des Motors wird automatisch Verschiebungsmotor_n vergeben, wobei n eine automatisch von HiCAD vergebene fortlaufende Nummer ist. |
||||||
|
|
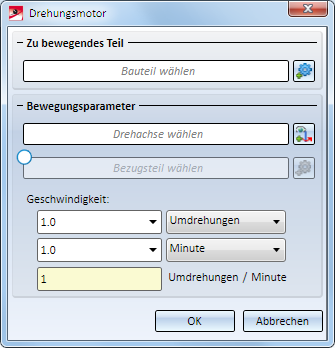
Drehungsmotor Der Drehungsmotor rotiert ein Bauteil mit einer bestimmten Geschwindigkeit um eine vorgegebene Achse .Wird die Geschwindigkeit negativ angegeben, dann bewegt sich das Teil in die entgegengesetzte Richtung.
Die Definition des Motors erfolgt analog zur Definition eines Verschiebungsmotors. Anstelle der Richtung wird hier die Drehachse bestimmt - entweder durch Identifizierung einer Kante oder durch Bestimmung zweier Punkte. Die Drehachse wird durch einen Drehpfeil gekennzeichnet. Die Geschwindigkeit wird bestimmt durch Anzahl der Umdrehungen pro Zeiteinheit oder durch den Drehwinkel pro Zeitinheit. Der Drehungsmotor wird anschließend im Simulationsbaum angezeigt. Als Name des Motors wird automatisch Drehungsmotor_n vergeben, wobei n eine automatisch von HiCAD vergebene fortlaufende Nummer ist. |
||||||
|
|
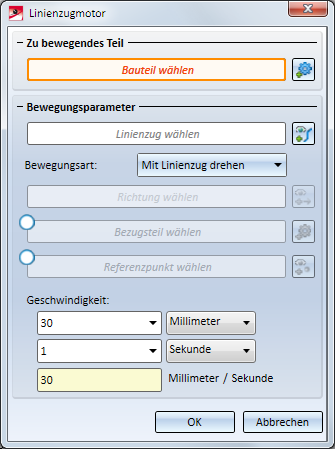
Linienzugmotor Der Linienzugmotor bewegt ein Bauteil mit einer bestimmten Geschwindigkeit entlang eines vorgegebenen Linienzuges. Wird die Geschwindigkeit negativ angegeben, dann bewegt sich das Teil in die entgegengesetzte Richtung. Die Bewegungsarten verhalten sich analog zum Kantenzugsweep. Die Geschwindigkeit darf negativ sein.
Die Definition des Motors erfolgt analog zur Definition eines Verschiebungsmotors. Anstelle der Verschiebungsrichtung wird hier der Linienzug identifiziert. Zusätzlich können Sie hier die Bewegungsart - analog zur Funktion Kantenzugsweep - sowie einen Referenzpunkt wählen. Bewegungsart
Referenzpunkt Ohne Angabe eines Referenzpunktes starten Linienzugmotoren immer am Start- oder Endpunkt des Linienzuges und berechnen Transformationen so, als wäre das zu bewegende Teil an dieser Stelle. Ist das Teil von diesem Startpunkt weit entfernt, dann vollführt das Teil eine für den Anwender überraschende Bewegung. Ein analoges Problem tritt auf, wenn das Teil inmitten einer Kante starten soll. Damit ist es weit weg vom Anfangs- und Endpunkt der Kante und es kommt auch hier zu ein er unerwarteten Bewegung. Durch die Angabe eines geeigneten Referenzpunktes auf dem Teil werden solche Probleme vermieden. Dieser Referenzpunkt wird auf den Linienzug projiziert. Der Linienzugmotor berechnet dann Transformationen relativ zu diesem Punkt auf dem Linienzug und nicht mehr zum bisher gewählten Startpunkt.
Der Linienzugmotor wird anschließend im Simulationsbaum angezeigt. Als Name des Motors wird automatisch Linienzugmotor_n vergeben, wobei n eine automatisch von HiCAD vergebene fortlaufende Nummer ist.
Ein Beispiel für Linienzugmotoren mit Referenzpunkt finden Sie hier. |

 und identifizieren Sie das gewünschte Bauteil im ICN oder in der Konstruktion. Das Teil wird farbig markiert.
und identifizieren Sie das gewünschte Bauteil im ICN oder in der Konstruktion. Das Teil wird farbig markiert. und legen Sie die Richtung durch Identifizierung einer Kante oder durch Bestimmung zweier Punkte (RMT) fest. Die gewählte Richtung wird durch ein Vektorsymbol gekennzeichnet.
und legen Sie die Richtung durch Identifizierung einer Kante oder durch Bestimmung zweier Punkte (RMT) fest. Die gewählte Richtung wird durch ein Vektorsymbol gekennzeichnet.  . Dann aktivieren Sie die Checkbox , klicken dann auf das Symbol
. Dann aktivieren Sie die Checkbox , klicken dann auf das Symbol  und identifizieren das Bezugsteil in der Konstruktion oder im ICN. Das Bezugsteil sollte sinnvollerweise ein ebenfalls angetriebenes Teil sein, d. h. ein Teil, zu dem ein Motor definiert ist.
und identifizieren das Bezugsteil in der Konstruktion oder im ICN. Das Bezugsteil sollte sinnvollerweise ein ebenfalls angetriebenes Teil sein, d. h. ein Teil, zu dem ein Motor definiert ist.

![]() Hinweise:
Hinweise:
- Ein Bauteil kann parallel in verschiedenen Motoren verwendet werden.
- Beim Abspielen haben Sie die Möglichkeit, die Simulation vorwärts und rückwärts laufen zu lassen. Bei der Berechnung der Simulation wird die Abspielart jedoch nicht berücksichtigt. Dies lässt sich dadurch lösen, dass ein weiterer Motor mit nahezu denselben Daten, aber mit umgekehrter Richtung angelegt wird. Das Zeitintervall dieses Motors muss dann hinter dem Zeitintervall des ersten Motors beginnen. Für Filme lässt sich das Vor- und Zurücklaufen von Simulationen auch in den Einstellungen für die Filmerzeugung wählen.
- Im Modus Physikalische Simulation ist die Funktionen Linienzugmotor inaktiv.
- Motoren lassen sich auch definieren, wenn die Bauteile in einem "bewegten" Zustand sind, d. h. wenn die Simulation auf Pause steht. Damit neue Motoren aber in der Simulation berücksichtigt werden, muss diese erst neu berechnet werden.
Motoren bearbeiten
Um die Parameter eines Motors zu bearbeiten, doppelklicken Sie den Namen des Motors im Simulationsbaum. Anschließend wird das entsprechende Dialogfenster aktiviert. In der Konstruktion werden das Bauteil sowie - je nach Motortyp - die Verschieberichtung, die Drehachse bzw. der Linienzug - farbig markiert.
Ändern Sie die Einstellungen und verlassen Sie das Dialogfenster mit OK.
Berechnen Sie anschließend die Simulation neu!
Durch einen Rechtsklick auf den Namen eines Motors im Simulationsbaum wird ein Kontextmenü aufgerufen, das weitere Funktionen zur Bearbeitung des Motors enthält:
Ein deaktivierter Motor wird bei der Berechnung der Simulation nicht berücksichtigt. Ein gelöschter Motor kann mit Undo wiederhergestellt werden
Ob ein Motor aktiv oder inaktiv ist, wird im Simulationsbaum durch ein entsprechendes Symbol gekennzeichnet. Die Symbole haben folgende Bedeutung:
|
|
Verschiebungsmotor aktiv |
|
Verschiebungsmotor inaktiv |
|
|
Drehungsmotor aktiv |
|
Drehungsmotor inaktiv |
|
|
Linienzugmotor aktiv |
|
Linienzugmotor inaktiv |
|
|
Die Angaben zum Motor sind unvollständig. |
|
|







 Die Länge eines Zeitintervalls lässt sich als Zeitwert für die Geschwindigkeit eines Motors übernehmen. Dazu klicken Sie mit der rechten Maustaste auf die Zeitleiste und wählen im Kontextmenü die Funktion Zeit übernehmen. Anschließend wird der Änderungsdialog des Motors aufgerufen und der geänderte Wert rot hervorgehoben.
Die Länge eines Zeitintervalls lässt sich als Zeitwert für die Geschwindigkeit eines Motors übernehmen. Dazu klicken Sie mit der rechten Maustaste auf die Zeitleiste und wählen im Kontextmenü die Funktion Zeit übernehmen. Anschließend wird der Änderungsdialog des Motors aufgerufen und der geänderte Wert rot hervorgehoben.

Das Andockfenster Simulation (3D) • Simulationsbeispiele (3D)