Simulationsbeispiele - Motoren mit Bezugsteil
- Teil mit Verschiebungsmotor + Bezugsteil, Bezugsteil mit Verschiebungsmotor
- Teil mit Drehungsmotor + Bezugsteil, Bezugsteil mit Verschiebungsmotor

Teil mit Verschiebungsmotor + Bezugsteil, Bezugsteil mit Verschiebungsmotor
Wir verwenden das Beispiel aus der Bewegungssimulation mit den zwei Zeitintervallen, löschen aber die Motoren 1 und 3.

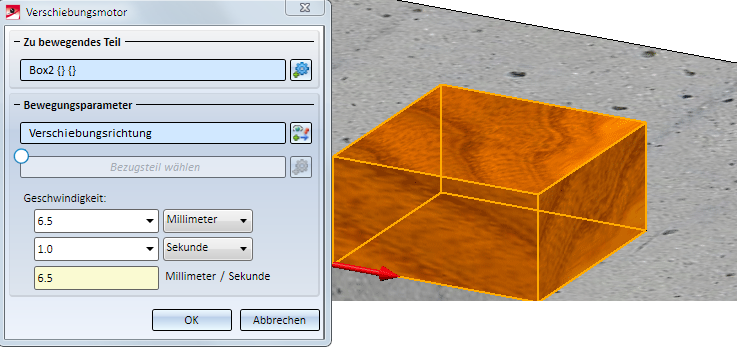
Der Verschiebungsmotor_0 soll jetzt Box2 als Bezugsteil verwenden.
- Doppelklicken auf Verschiebungsmotor_0
- Aktivieren dann die Checkbox
- Klicken auf das Symbol
 und identifizieren der Box2
und identifizieren der Box2 - Verlassen des Fensters mit OK
- Einstellen der Kollisionsprüfung
- Berechnung der Simulation
Film der Simulation

Teil mit Drehungsmotor und Bezugsteil, Bezugsteil mit Verschiebungsmotor
Wir verwenden das abgebildete Beispiel.
Für die Box1 soll ein Drehungsmotor definiert mit Box2 als Bezugsteil, für Box2 soll ein Verschiebungsmotor definiert werden.
Dazu wird zunächst die Baugruppe aktiviert. Dann:
- Anlegen einer neuen Simulation

- Aufruf der Funktion Verschiebungsmotor
 (zu bewegendes Bauteil Box2, Richtung: untere Kante der Box (a), Geschwindigkeit 6.5 mm/sec.)
(zu bewegendes Bauteil Box2, Richtung: untere Kante der Box (a), Geschwindigkeit 6.5 mm/sec.)
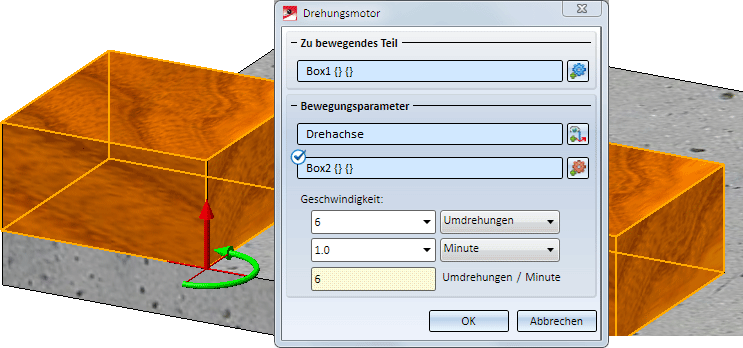
- Aufruf der Funktion Drehungsmotor
 (zu drehendes Bauteil Box1, Drehachse vordere, rechte Kante, Geschwindigkeit 6 Umdrehungen/min, Bezugsteil Box2)
(zu drehendes Bauteil Box1, Drehachse vordere, rechte Kante, Geschwindigkeit 6 Umdrehungen/min, Bezugsteil Box2)
- Einstellen der Zeitintervalle:
- maximale Simulationszeit
- Verschiebungsmotor: 0 - 6 sec
- Drehungsmotor: 3 - 6 sec

- Berechnung der Simulation
Film der Simulation
Die Bezugsteiloption hat in diesem Beispiel folgende Auswirkung:
Der Drehungsmotor startet laut Zeitintervall erst an der 3. Sek. Da aber der Drehungsmotor die Box2 als Bezugsteil verwendet und der für das Bezugsteil definierte Verschiebungsmotor ab Sek. 0 wirkt, wird auch Box1 ab Sek. 0 verschoben und erst ab Sek. 3 gedreht.
Würde man im obigen Beispiel für den Drehungsmotor die Drehgeschwindigkeit auf 0 ändern oder den Start-Schalter an das Ende der Simulation verschieben, dann würde Box1 einfach die Verschiebung von Box2 übernehmen und sich identisch bewegen.
