Project: HiCAD Point Cloud
Point clouds are collections of measurement points that are captured with a 3-D laser scanner. They consist of millions of points representing an environment, a building, a room or similar. The file size of a point cloud is typically between 10 and 100 gigabytes. The more scans are made from different positions, the more accurately the point cloud represents the scanned object. But this also increases the size of the point cloud.
The existing data are recorded by a 3-D laser scanner in order to create a new matching model drawing. This can be an environment in which a new structure is to be fitted or a facility that is to be installed in a room.
Up to now, in practice the responsible technician had to spend a lot of time on site manually measuring the existing structure. This often took days and it was often the case that he had to travel to the site several times to carry out further measurements.
On the basis of the point clouds captured by 3-D scanners, the existing structure can be modelled directly in a suitable CAD system and can be used as a reference during the actual design process and later for visualisation. As a result, the often tedious measurements are no longer necessary.
A model drawing, e.g. of a building or a plant, which has been modelled in the CAD system and subsequently realised, can be measured by a 3-D laser scanner. The point cloud is then imported into the CAD system to check whether the drawing has been implemented correctly. This means that it is checked whether the point cloud and the CAD construction match and the deviations are evaluated.
HiCAD supports the import of point clouds by using the - optionally available - HiCAD Point Cloud module. With the functions of this module, point clouds created with all common 3-D laser scanners can be converted, imported and prepared for use in HiCAD.
Prerequisite for the point cloud: It must be in the .E57 format. This file format can be converted for further use in HiCAD.
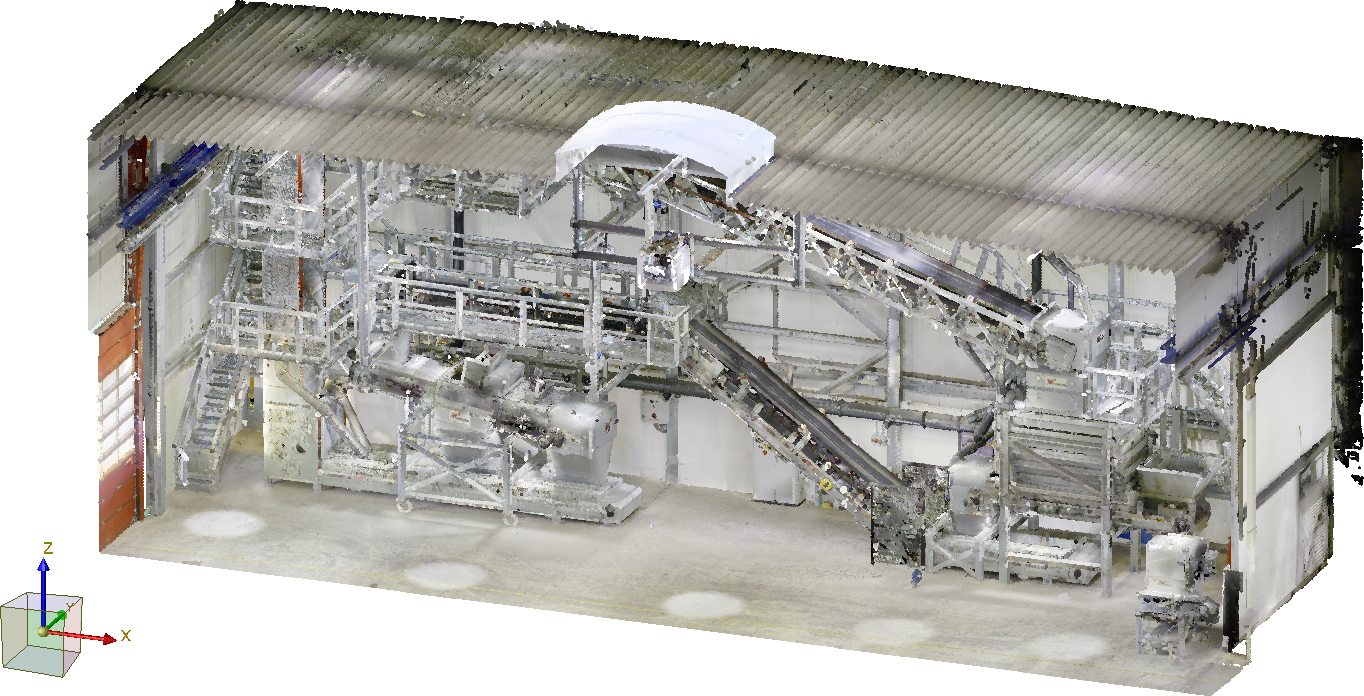
Example of a point cloud imported to HiCAD (Image: VHV Anlagenbau GmbH, Hörstel)

Highly enlarged detail of the point cloud shown above
![]() Please note::
Please note::
Faro© SCENE projects can be directly (without conversion) imported to HiCAD, if the project point cloud has been created in Faro© SCENE.
HiCAD Point Cloud is 100% compatible with Faro© SCENE 2019.2.
If an attempt is made to load an Faro Scene file that has been saved in a newer format, HiCAD will display a corresponding message, e.g.



Procedure • Point Cloud Functions • Point Clouds: Examples
|
© Copyright 1994-2020, ISD Software und Systeme GmbH |
Data protection • Terms and Conditions • Cookies • Contact • Legal notes and Disclaimer