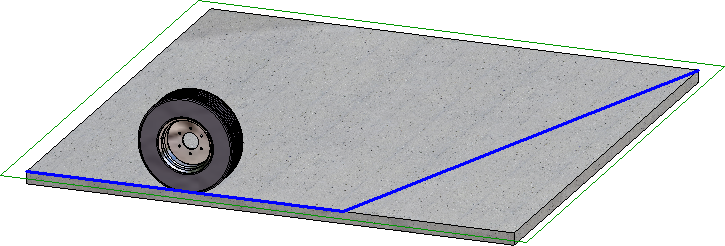
In this example the wheel is to be moved along the blue polyline - first without, and then with reference point specification.
Proceed as follows:

 and deactivate the View control
and deactivate the View control  .
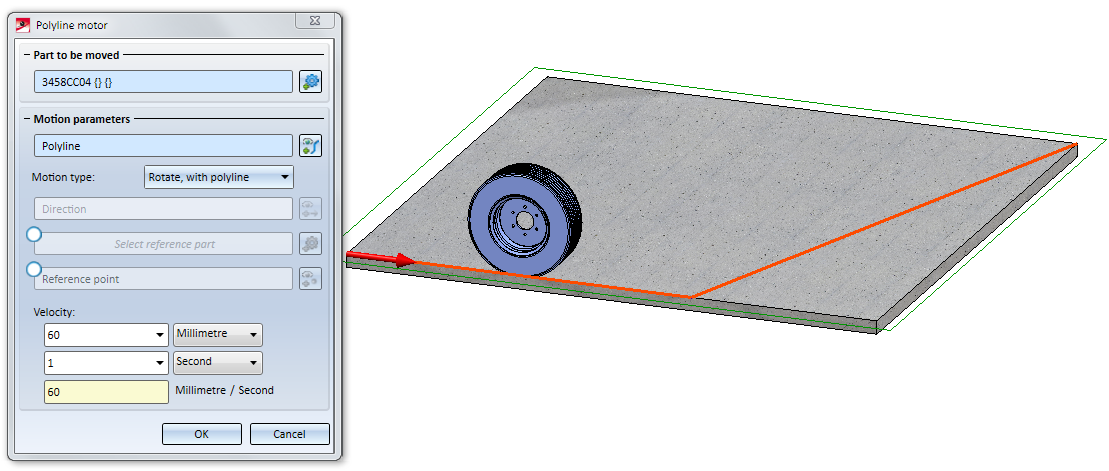
.  function (the part to be moved: Wheel; Polyline: the blue sketch; Direction: Polyline; Motion type: Rotate with polyline; No reference point; Velocity: 60 mm/sec).
function (the part to be moved: Wheel; Polyline: the blue sketch; Direction: Polyline; Motion type: Rotate with polyline; No reference point; Velocity: 60 mm/sec).
Video of simulation
As you can see in the video, the polyline motor starts at the start point of the polyline. All transformations are calculated as if the wheel was located in this position. As a result, there will be an unwanted movement before the wheel switches the direction.
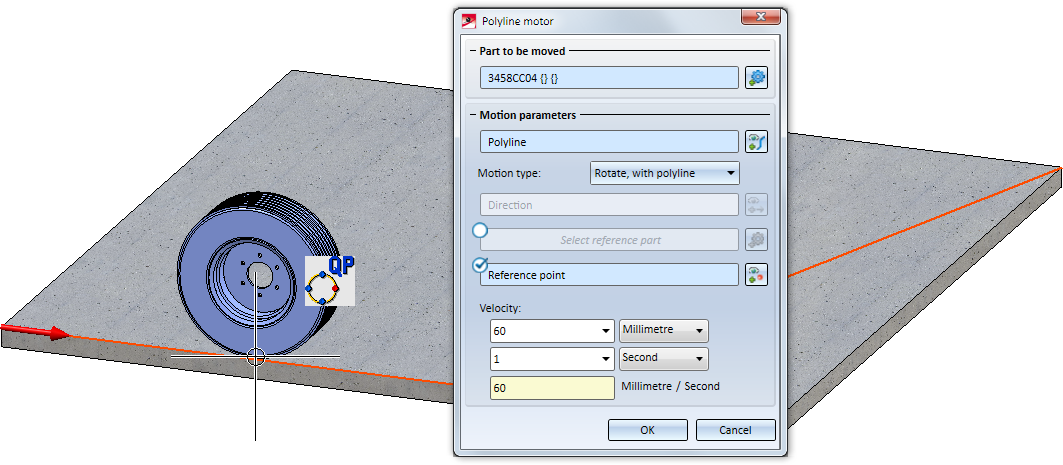
Here, use the same settings as in Case 1, with the difference that you use a reference point here, namely, the quad point at the bottom of the wheel as shown below:
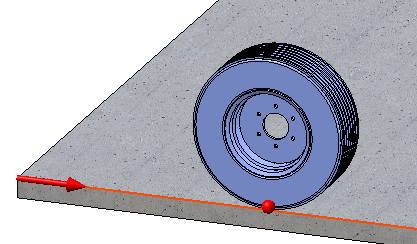
The reference point is indicated by a small red sphere:
When you now recalculate the simulation, no unexpected movements will occur:
Video of simulation


Simulations (3-D) • Motion Simulation/Physical Simulation (3-D) • Simulation: Examples (3-D)
|
© Copyright 1994-2018, ISD Software und Systeme GmbH |